Contents
- Medical Imaging
- Ultrasonic Scan
- CT Scan
- Radon Transform
- 3D graphics rendering
- Splines
- Cubic Parametric Splines
- Catmull Rom vs B-splines
- Interpolation
- Nearest neighbor interpolation
- Linear interpolation
- Delaunary triangulation
- Radial Basis Function Interpolation
- Texture Mapping
- Matching Cube
- Surface Normal
- Matching cube
- Comments
Medical Imaging
Ultrasonic Scan
- The ultrasound machine is calibrated with a constant speed. If speed mismatch, the size/distance of the machine would appear to be wrong
- If the actual speed is smaller, than the distance would be larger
- If the actual speed is larger, than the distance would be smaller
D′=DVa∗Vcwhere D′ is the appeared distance, D is the actual distance, Va is the actual velocity, Vc is the calibrated velocity entered into the machine
- The distance distortion only happen if it is measured in the direction of the travel of the ultrasound. Not affected if the distance is parallel to the probe.
CT Scan
Radon Transform
- Remember the transform equation:
f(s,ϕ)=R[f(x,y)]=∫∞−∞f((scos(ϕ)−lsin(ϕ)),(ssin(ϕ)+lcos(ϕ))
- To sketch sinogram: try to solve s as a function of ϕ by eliminating l
x=scos(ϕ)−lsin(ϕ))y=ssin(ϕ)+lcos(ϕ)
- To solve the transform equation try represent x and y in polar coordinates and remember that the integration is with respect to l
3D graphics rendering
Splines
Cubic Parametric Splines
- Can easily provide C1 and G1 continuity across the surface while interpolating data.
- Provide C2 and G2 continuity if approximate data is allowed.
- It is easy to guarantee the convex hull property
Catmull Rom vs B-splines
Interpolation
Nearest neighbor interpolation
- Set the value of the function to the value of its closest sample
- Results in visible block artifacts
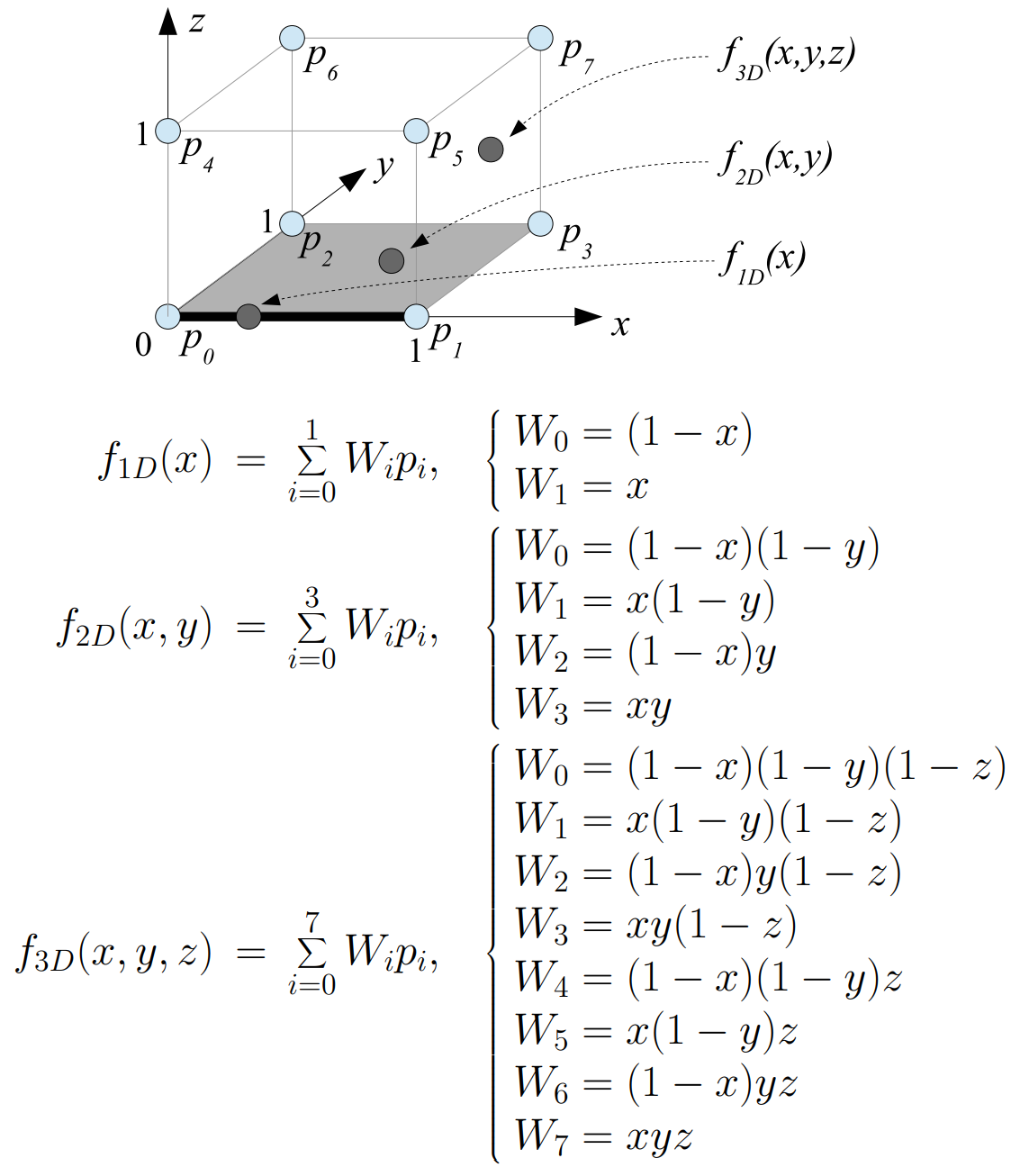
Linear interpolation
The following graph shows linear, bilinear, trilinear interpolation for a 3D point.
Delaunary triangulation
- It makes sure the circumcircle of each triangle does not contain any points from any other triangles.
Radial Basis Function Interpolation
- The chosen coefficient for the RBF should match the dataset dimension approximately
Texture Mapping
- Gourand and Phong shading work with vertex normal, which are formed b averaging the normals of all polygons incident at a vertex
- Gourand shading proceeds by calculating a color at each vertex using the vertex normal and the Phong model.Colours for interior pixels are found by bilinear interpolation.
Matching Cube
Surface Normal
- Surface normal are important as it allows to calculate the shading or the surface.
- The direction of the normal defines if the surface is facing towards or away from the camera, for closed surface, facing away from the surface do not need to be rendered
- Surface normal can be calculated from each triangle by taking the cross product of any two sides
Matching cube
- A process for creating
Comments